
.jpg)


| 品牌 | ABB | |
| 规格 | ||
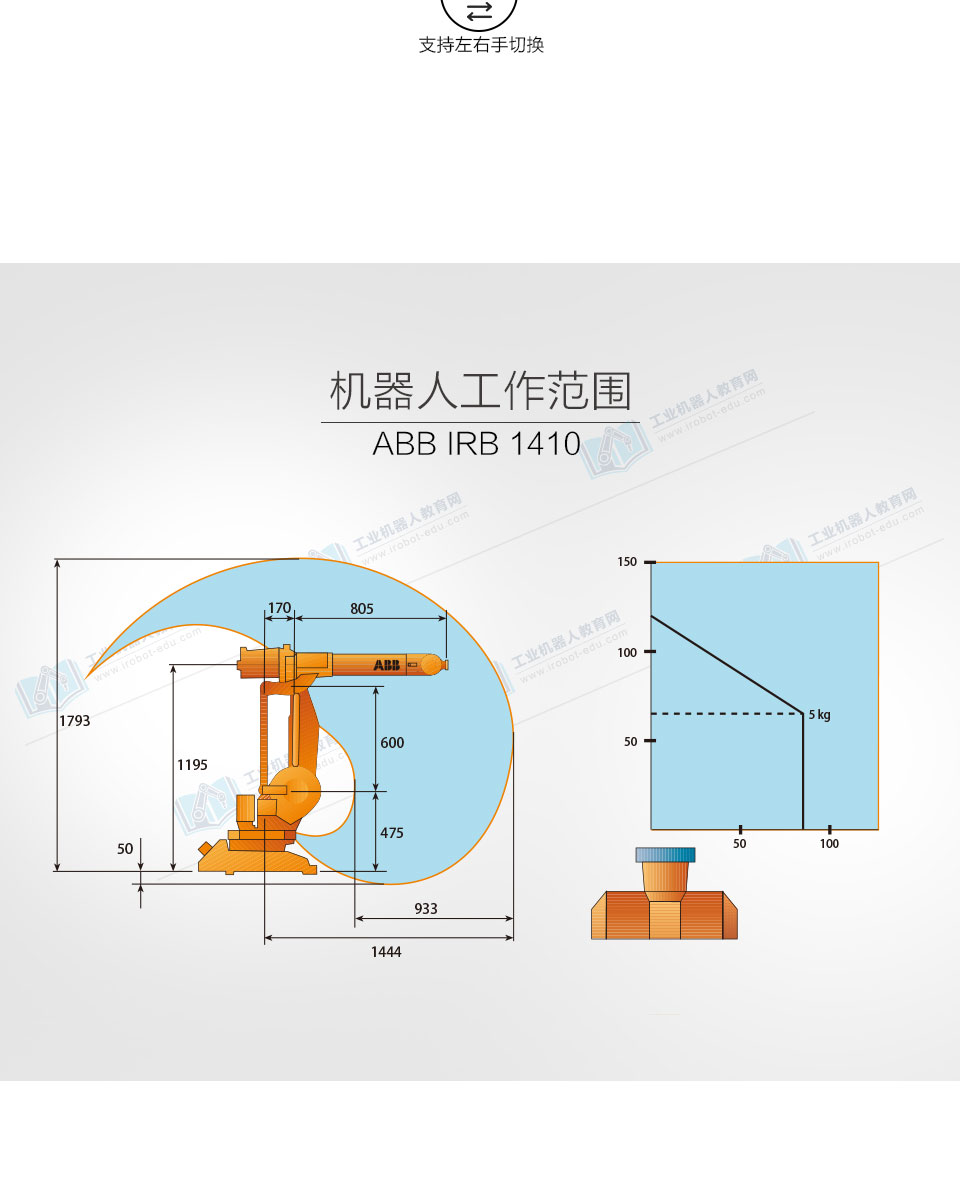
| 机器人 | 承重能力 | 5轴到达距离 |
| IRB 1410 | 5kg | 1.44m |
| 附加载荷 | ||
| 第3轴 | 18kg | |
| 第1轴 | 19kg | |
| 轴数 | ||
| 机器人本体 | 6 | |
| 外部设备 | 6 | |
| 集成信号源 | 上臂12路信号 | |
| 集成气源 | 上臂最高8 bar | |
| 性能 | ||
| 重复定位精度 | 0.05mm(ISO实验平均值) | |
| TCP最大速度 | 2.1m/s | |
| 电气连接 | ||
| 电源电压 | 200-600 V, 50/60 Hz | |
| 变压器额定功率 | 4kVA / 7.8kVA,带外轴 | |
| 物理特性 | ||
| 机器人安装 | 落地式 | |
| 机器人底座尺寸 | 620×450 mm | |
| 重量 | 225kg | |
| 环境 | ||
| 机械手环境温度: | ||
| 环境温度 | 5-45°C | |
| 相对湿度 | 最高95% | |
| 防护等级 | 电气设备为IP 54,机械设备需干燥环境 | |
| 噪音水平安全性 | 最高70 dB (A) | |
| 辐射 | EMC/EMI屏蔽 | |
| 洁净室 | 100级,美国联邦标准209e | |
 苏公网安备 32059002003032号 Copyright © 浙江海渡智能装备有限公司
苏公网安备 32059002003032号 Copyright © 浙江海渡智能装备有限公司 


 加入购物车
加入购物车 购买咨询
购买咨询
 商城客服01
商城客服01